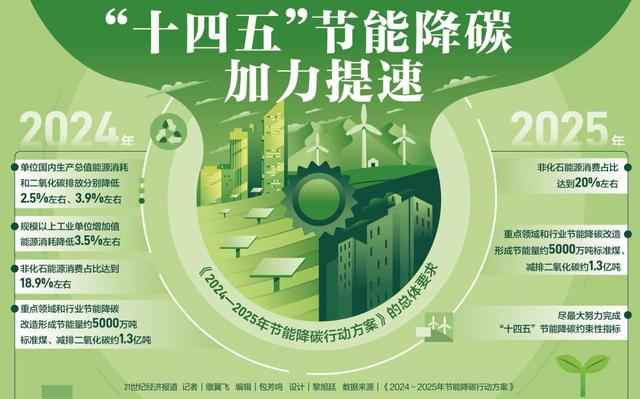
國(guó)務(wù)院關(guān)于印發(fā)《2024—2025年節(jié)能降碳行動(dòng)方案》的通知
|
2024-08-21
串聯(lián)式燃料電池混合動(dòng)力汽車(chē)零部件選型和匹配優(yōu)化研究
串聯(lián)式燃料電池混合動(dòng)力汽車(chē)零部件選型和匹配優(yōu)化研究[摘要]采用兩種優(yōu)化算法對(duì)燃料電池混合動(dòng)力汽車(chē)的兩種能量管理策略進(jìn)行了優(yōu)化仿真。結(jié)果符合實(shí)際的設(shè)計(jì)要求,可以作為零部件選型和匹配的